| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 |
Tags
- DP
- 마이크로프로세서
- dfs
- 조합
- 구현
- 토끼와 경주
- 시뮬레이션
- 마법의숲탐색
- 소프티어
- 왕실의기사대결
- 순서대로방문하기
- ros
- DenseDepth
- 포탑부수기
- BFS
- Calibration
- 삼성기출
- 이진탐색
- 수영대회결승전
- 슈퍼컴퓨터클러스터
- 루돌프의반란
- 3Dreconstruction
- 코드트리빵
- 싸움땅
- PQ
- 나무박멸
- 코드트리
- ARM
- ICER
- 백준
Archives
- Today
- Total
from palette import colorful_colors
[프로젝트] Checkboard Image calibration 미니 프로젝트 (with python코드) 본문
연구활동/프로젝트 기록
[프로젝트] Checkboard Image calibration 미니 프로젝트 (with python코드)
colorful-palette 2023. 4. 4. 22:35https://github.com/woodong11/Checkboard_Calibration
GitHub - woodong11/Checkboard_Calibration: 폴더 안에 들어있는 체크보드 이미지들을 이용해 python으로 calib
폴더 안에 들어있는 체크보드 이미지들을 이용해 python으로 calibration, undistortion하는 예제입니다. - GitHub - woodong11/Checkboard_Calibration: 폴더 안에 들어있는 체크보드 이미지들을 이용해 python으로 cali
github.com
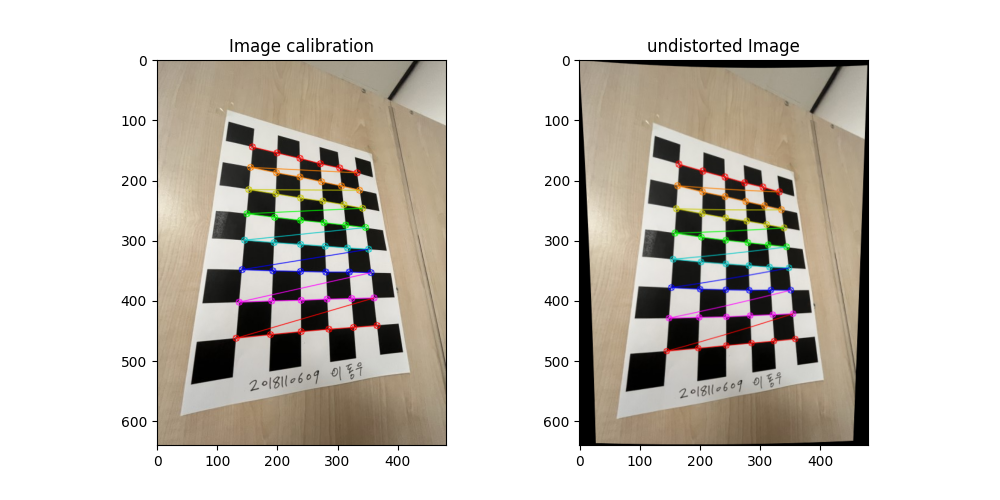
calibration으로 여러장의 체크보드 이미지로 intrinsic parameter, distortion coefficient, rveves, tveces를 구하는 코드입니다.


이런식으로 현재 폴더 안에 image 폴더를 만들어 주고 이미지들을 넣은 다음 실행해줍니다.
(확장자명이 다르다면 코드상에서 변경 가능합니다)
<예시 이미지>

<python 코드>
import cv2
import numpy as np
import glob
from matplotlib import pyplot as plt
# 코너의 가로, 세로, 사이즈, 불러올 이미지 정하기
checkboard_x = 6
checkboard_y = 8
checkboard_size = 30
folder_path = './image' # 이미지들이 들어있는 폴더 경로
image_list = glob.glob(folder_path + '/*.jpg') # 확장자명에 따라 변경하기
# 정확도 향상, 체크보드 그리드 포인트 생성
criteria = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_MAX_ITER, 30, 0.001)
obj_points = [] # 실제 3D 포인트
img_points = [] # 실제 2D 포인트
obj_grid = np.zeros((1, checkboard_x*checkboard_y, 3), np.float32)
obj_grid[0, :, :2] = np.mgrid[0:6,0:8].T.reshape(-1, 2)
#이미지 가져오기
for image_path in image_list:
img = cv2.imread(image_path)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 이미지에서 체크보드 패턴 찾기
ret, corners = cv2.findChessboardCorners(gray,
(checkboard_x,checkboard_y),
cv2.CALIB_CB_ADAPTIVE_THRESH
+ cv2.CALIB_CB_FAST_CHECK
+ cv2.CALIB_CB_NORMALIZE_IMAGE)
if ret == True:
obj_grid = obj_grid * checkboard_size
obj_points.append(obj_grid)
corners2 = cv2.cornerSubPix(gray, corners, (11, 11), (-1, -1), criteria) # 코너 좌표 정확도 높이기
img_points.append(corners2)
img = cv2.drawChessboardCorners(img, (6,8), corners2, ret)
# calibration 실행
ret, camera_matrix, dist_coef, rvecs, tvecs = cv2.calibrateCamera(obj_points, img_points, gray.shape[::-1], None, None)
# undistort을 보여줄 새로운 매트릭스 정의
h, w = img.shape[:2]
new_matrix, roi = cv2.getOptimalNewCameraMatrix(camera_matrix, dist_coef, (w, h), 1, (w, h))
# undistort 하기
img_undst = cv2.undistort(img,camera_matrix, dist_coef, None, new_matrix)
# 카메라 보정 오차 계산
mean_error = 0
for i in range(len(obj_points)):
img_points2, _ = cv2.projectPoints(obj_points[i], rvecs[i], tvecs[i], camera_matrix, dist_coef)
error = cv2.norm(img_points[i], img_points2, cv2.NORM_L2) / len(img_points2)
mean_error += error
# calibration 결과 출력
print("Camera Intrinsic matrix:\n", camera_matrix, end = "\n\n")
print("Distortion coefficients:\n", dist_coef, end= "\n\n")
print("Total Error\n", mean_error / len(obj_points), end="\n\n")
# 이미지에서 검출된 대상이 카메라를 중심으로 어떤 각도로 회전되었는지를 나타내는 벡터. 각각 x, y, z 축을 중심으로 회전하는 각도
print("rvecs:\n", rvecs, end= "\n\n")
# 월드 좌표계에서 좌표계에서 카메라의 위치를 나타냄
print("tvecs:\n", tvecs, end= "\n\n")
# 결과 사진 출력
fig, axis = plt.subplots(1, 2, figsize=(10, 5))
axis[0].imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
axis[1].imshow(cv2.cvtColor(img_undst, cv2.COLOR_BGR2RGB))
axis[0].set_title('Image calibration')
axis[1].set_title('undistorted Image')
plt.show()'연구활동 > 프로젝트 기록' 카테고리의 다른 글
| [프로젝트] Node.js, Vue.js 이용 각종 프로젝트 모음(프론트 + 백) (0) | 2024.04.01 |
|---|---|
| [프로젝트] SSD 구현 미니 프로젝트 with C (0) | 2024.04.01 |
| [프로젝트, 논문] 열화상 카메라를 이용 실내 깊이 데이터셋 제작 및 딥러닝 기반 깊이 이미지 추정 (0) | 2024.01.21 |
| [프로젝트] 개 고양이 분류기 미니 프로젝트 (feat. ResNet) (0) | 2023.04.04 |
| [프로젝트] 색깔&패턴 인식 로봇팔 - LIG넥스원 PBL과제 (경북대학교 DGM ICT-DNA) (0) | 2023.03.07 |
'연구활동/프로젝트 기록' Related Articles
more


